
















엔비디아, 아이작 ROS 소프트웨어 최신 업데이트 발표
등록일 2022년10월24일 12시00분








엔비디아(CEO 젠슨 황)가 2022년 로스콘(ROSCon)에서 최신 아이작(Isaac) 로봇운영체제(ROS) 소프트웨어 릴리스인 개발자 프리뷰(DP) 2를 발표했다고 밝혔다.
이번 릴리스에는 ROS 2 개발자를 위한 추가 기능을 비롯하여 자율 이동 로봇(AMR) 플릿을 위한 새로운 클라우드와 엣지 투 로봇(edge-to-robot) 작업 관리, 모니터링 소프트웨어가 포함됐다.
엔비디아 아이작 ROS는 하드웨어 가속 성능을 위한 개별 패키지(GEM)와 전체 파이프라인(NITROS)으로 구성된다. 새로운 릴리스는 성능 향상 외에도 아래와 같은 기능이 추가됐다.
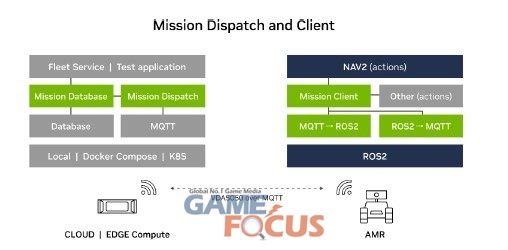
- 미션 디스패치와 클라이언트(Mission Dispatch and Client): 차량 관리 시스템에서 로봇에 작업을 할당하고 모니터링하기 위한 오픈 소스 CPU 패키지이다. 미션 디스패치는 대규모 차량 관리 시스템의 일부로 통합될 수 있는 클라우드 네이티브 마이크로서비스(cloud-natvie microservice)이다.
- 프리스페이스 세그멘테이션(FreeSpace Segmentation) 분할: 내비게이션 스택(navigation stack)에 대한 입력으로 사용할 로봇 근처에서 비전 AI 기반 점유 그리드를 생성하기 위한 하드웨어 가속 패키지이다.
- H.264 비디오 인코딩과 디코딩: 압축된 비디오 데이터 기록과 재생을 위한 하드웨어 가속 패키지이다. 비디오 데이터 수집은 AI 인식 모델을 훈련하는 데 중요한 부분이다. 엔비디아 젯슨 AGX 오린(Jetson AGX Orin) 플랫폼에서 새로운 GEM의 성능은 1080p 스테레오 카메라 2대에서 30fps(총 120fps 이상)로 측정되어 데이터 설치 공간을 최대 10배까지 줄였다.
미션 디스패치와 클라이언트
미션 디스패치와 클라이언트는 차량 관리 시스템과 ROS 2 로봇 간에 작업을 할당하고 추적할 수 있는 표준형 오픈 소스 방법을 제공한다. 미션 디스패치와 클라이언트는 로봇 플릿을 위해 특별히 설계된 개방형 통신 표준인 VDA5050을 사용하여 통신한다. 메시지는 사물인터넷(IoT) 애플리케이션을 위한 경량 메시징 프로토콜인 MQTT를 통해 무선으로 전송된다.

미션 디스패치는 NGC에서 다운로드하거나 아이작 깃허브(Isaac GitHub)에서 소스 코드로 사용할 수 있는 컨테이너형 마이크로서비스로 차량 관리 시스템에 통합될 수 있다. 미션 디스패치는 오토 모터스(OTTO Motors)와 인오빗(InOrbit)이 개발하여 최근 발표한 VDA5050 커넥터와 같은 다른 오픈 소스 ROS 2 클라이언트와 상호 운용성을 갖는 것으로 확인됐다.
ROS 2 험블(Humble)과 호환되는 미션 클라이언트는 아이작 ROS 깃허브에서 패키지로 제공되며, Nav2 내비게이션 스택과 사전 통합되어 로봇에서 탐색 및 기타 작업을 할당하고 추적한다.
오토 모터스 CTO인 라이언 가리피(Ryan Gariepy)는 "현실 세계에서 모바일 로봇의 배포가 가속화됨에 따라 상호 운용성이 점점 중요해지고 있다. VDA5050과 ROS2를 오픈소스 커뮤니티로 연결하면 로봇 제조사가 차별화에 집중할 수 있는 동시에 차량 관리 솔루션의 혁신을 촉진할 수 있을 것이다”라고 말했다.
엔비디아 아이작 ROS 성능
아이작 ROS는 AI 인식, 이미지 처리와 탐색을 위해 ROS 2 개발자 커뮤니티에 지속적으로 하드웨어 가속 성능을 제공한다. 자율 로봇은 첨단 AI와 컴퓨터 비전 능력이 필요하다. 엔비디아 아이작 ROS는 로보틱스 업계가 보다 쉽게 최첨단 기술을 적용할 수 있도록 하기 위한 노력의 결과물이다.
주요 아이작 ROS 패키지의 최신 성능 수치에 대한 자세한 내용은 아이작 ROS 성능 요약에서 확인할 수 있다.
ROS 2 개발자를 위한 무료 교육
엔비디아는 엔비디아 아이작 ROS 전문가에게 고급 기술 교육을 제공하고 액세스를 제공하기 위해 ROS 2 개발자를 중심으로 한 새로운 웨비나 시리즈를 발표했다. 해당 세션은 무료이며 ROS 2용 가속 모듈을 개발하는 기술 전문가와 함께하는 Q&A 시간을 제공한다.
웨비나 주제:
- 2022년 11월 14일: <엔비디아 젯슨에서의 vSLAM을 사용한 핀포인트, 250fps, ROS 2 로컬라이제이션>, 진행자 라파엘로 봉기(Raffaeello Bonghi)
- 2022년 12월: <아이작 ROS를 이용한 스테레오 기반 깊이 추정(Stereo-Based Depth Estimation)>, 진행자 헤말 샤(Hemal Shah)
- 2022년 12월: <YOLOv5를 이용한 아이작 ROS 가속 모듈 구축> 진행자 아사와리 반디(Asawaree Bandhi)
개발자들은 여기에서 통해 11월 14일 세션에 등록할 수 있다. 곧 더 많은 웨비나가 추가될 예정이다.
로스콘 2022
일본 교토에서 열리는 ROS콘 참석자들은 라이브스트림 링크를 통해 2022년 10월 20일 오후 2시 10분(한국시간)에 '아이작 심을 통한 가제보 브릿징(Bridging Gazebo with Isaac Sim)’ 기술 세션에 참석할 수 있다.
엔비디아 젯슨 AGX 오린 개발자 키트(NVIDIA Jetson AGX Orin Developer Kit)에서 실행되는 아이작 ROS 라이브 데모는 22번 부스의 엔비디아를 방문해 확인할 수 있다.
시작하기
지금 바로 /NVIDIA-ISAC-ROS 깃허브 보고서에 요약된 예를 검토하고 엔비디아 아이작 ROS를 시작할 수 있다.
| |
| |
| |
| |
|

|
|
| 관련뉴스 | - 관련뉴스가 없습니다. |














|
||||||||||||||||||||||||
|

